home..
heightmap_spawner: Gazebo heightmap from occupancy grid
January 2025
navigation
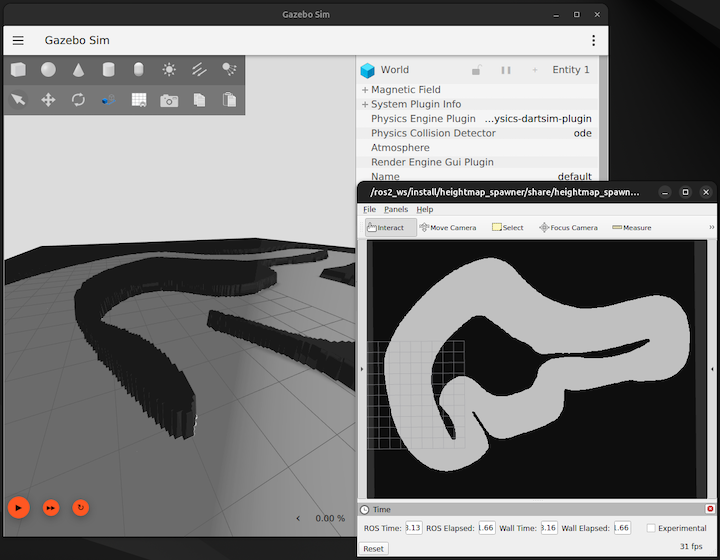
I’ve been working on a ROS 2 package called “heightmap_spawner” to simplify the real-to-sim workflow in Gazebo. It converts 2D occupancy grid maps from map server into 3D heightmaps automatically, so you can quickly generate simulation environment from SLAM map data.
It’s lightweight, easy to use, and saves time when setting up environments for navigation or SLAM testing. If you’re interested, check it out on GitHub!
Repository: https://github.com/damanikjosh/heightmap_spawner