Publications
-
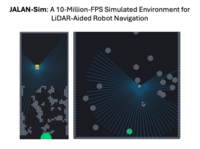 JALAN-Sim: A 200-Million-FPS Simulated Environment for 2D Navigation in Cluttered Spaces
JALAN-Sim: A 200-Million-FPS Simulated Environment for 2D Navigation in Cluttered SpacesJoshua Julian Damanik, Chala Adane Deresa, Sujeong Park, Wajih Imliki, and Han-Lim Choi
In progress -
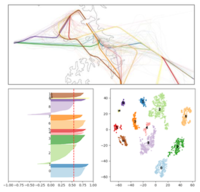
 Aircraft Trajectory Segmentation-based Contrastive Coding: A Framework for Self-supervised Trajectory Representation
Aircraft Trajectory Segmentation-based Contrastive Coding: A Framework for Self-supervised Trajectory RepresentationThaweerath Phisannupawong, Joshua Julian Damanik, Han-Lim Choi
IEEE Open Journal of Intelligent Transportation Systems -
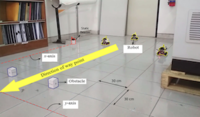
 LiCS: Navigation using Learned-imitation on Cluttered Space
LiCS: Navigation using Learned-imitation on Cluttered SpaceJoshua Julian Damanik, Jae-Won Jung, Chala Adane Deresa, Han-Lim Choi
IEEE Robotics and Automation Letters (RA-L) & IEEE International Conference on Robotics and Automation (ICRA) 2025 -
 Autonomous Ground Navigation in Highly Constrained Spaces: Lessons Learned From the Third BARN Challenge at ICRA 2024 [Competitions]
Autonomous Ground Navigation in Highly Constrained Spaces: Lessons Learned From the Third BARN Challenge at ICRA 2024 [Competitions]Xuesu Xiao , Zifan Xu, Aniket Datar, Garrett Warnell, Peter Stone, Joshua Julian Damanik, Jaewon Jung, Chala Adane Deresa, Than Duc Huy, Chen Jinyu, Chen Yichen, Joshua Adrian Cahyono, Jingda Wu, Longfei Mo, Mingyang Lv, Bowen Lan, Qingyang Meng, Weizhi Tao, and Li Cheng
IEEE Robotics and Automation Magazine (RAM) -
 Comparative Analysis of Autoencoder Architectures on Incheon Airport Flights Trajectory Reconstruction
Comparative Analysis of Autoencoder Architectures on Incheon Airport Flights Trajectory ReconstructionJoshua Julian Damanik, Thaweerath Phisannupawong, Han-Lim Choi
Korean Society for Aeronautical and Space Sciences 2023 Fall Conference -
Consensus-based clustering and data aggregation in decentralized network of multi-agent systems
Joshua Julian Damanik, Ming Chong Lim, Hyeon-Mun Jeong, Ho-Yeon Kim, Han-Lim Choi
PeerJ Computer Science -
 Polygon formation of multiple nonholonomic mobile robots with double-level-control collision avoidance scheme
Polygon formation of multiple nonholonomic mobile robots with double-level-control collision avoidance schemeAugie Widyotriatmo, Endra Joelianto, Azka Muji Burohman, Joshua Julian Damanik, Yul Y Nazaruddin
Journal of Control and Decision -
Sampling-Based Path Planning Algorithm Considering Moving Obstacles Based on RRT
Joshua Julian Damanik, Han-Lim Choi
International Conference on Robot Intelligence Technology and Applications -
 Spatial Trajectory Clustering of Incheon Airport Flights
Spatial Trajectory Clustering of Incheon Airport FlightsJoshua Julian Damanik, Changkyo Shin, Han-Lim Choi
Korean Society for Aeronautical and Space Sciences 2022 Fall Conference -
 Solving delivery assignment in hybrid-transit network using multi-agent reinforcement learning
Solving delivery assignment in hybrid-transit network using multi-agent reinforcement learningJoshua Julian Damanik, Hans Kasan, Han-Lim Choi
International Conference on Robot Intelligence Technology and Applications (RiTA)