Joshua J. Damanik
Postdoctoral Researcher at LiCS (Advisor: Prof. Han-Lim Choi)
Visiting Researcher at LARR (Advisor: Prof. Hyoun Jin Kim)
Affiliation: Korea Advanced Institute of Science and Technology
Email: joshuajdmk [at] gmail [dot] com

Photo Gallery »


Blog Posts »
- 2025-08-18» Started position as postdoctoral researcher at KAIST
- 2025-07-11» Gave a technical talk at TraceID
- 2025-06-09» Defended PhD dissertation 🎓
- 2025-05-20» Presented LiCS paper in ICRA 2025
- 2025-05-19» Presented a poster in ICRA 2025 Doctoral Consortium
- 2024-11-01» Won 7th prize award on F1tenth Korea Championship
- 2024-09-18» Received an award from Daejeon Center for Creative Economy and Innovation
- 2024-05-16» Won first place in BARN Challenge 2024 hardware competition
- 2024-05-08» Won first place in BARN Challenge 2024 simulation competition
Publications »
-
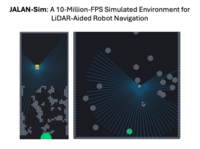 JALAN-Sim: A 200-Million-FPS Simulated Environment for 2D Navigation in Cluttered Spaces
JALAN-Sim: A 200-Million-FPS Simulated Environment for 2D Navigation in Cluttered SpacesJoshua Julian Damanik, Chala Adane Deresa, Sujeong Park, Wajih Imliki, and Han-Lim Choi
In progress -
 LiCS: Navigation using Learned-imitation on Cluttered Space
LiCS: Navigation using Learned-imitation on Cluttered SpaceJoshua Julian Damanik, Jae-Won Jung, Chala Adane Deresa, Han-Lim Choi
IEEE Robotics and Automation Letters (RA-L) & IEEE International Conference on Robotics and Automation (ICRA) 2025 -
 Polygon formation of multiple nonholonomic mobile robots with double-level-control collision avoidance scheme
Polygon formation of multiple nonholonomic mobile robots with double-level-control collision avoidance schemeAugie Widyotriatmo, Endra Joelianto, Azka Muji Burohman, Joshua Julian Damanik, Yul Y Nazaruddin
Journal of Control and Decision -
 Solving delivery assignment in hybrid-transit network using multi-agent reinforcement learning
Solving delivery assignment in hybrid-transit network using multi-agent reinforcement learningJoshua Julian Damanik, Hans Kasan, Han-Lim Choi
International Conference on Robot Intelligence Technology and Applications (RiTA)
© 2025 Joshua J. Damanik